01
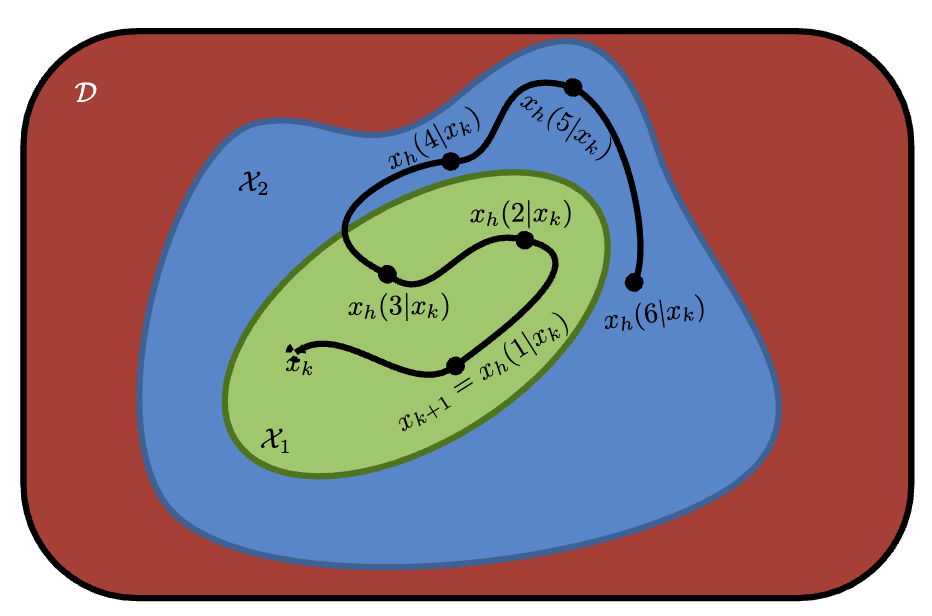
Safe Control
Safety verification and control design for dynamical systems.
My research is organized around three connected pillars: making control systems safe, making learning certifiable, and making autonomy work in practical engineering environments.
01
Safety verification and control design for dynamical systems.
02
Ensuring hard constraints in machine learning models.
03
Optimization and learning tools for autonomous systems operating in uncertain, real-world environments.